File:Perseverancepath.jpg
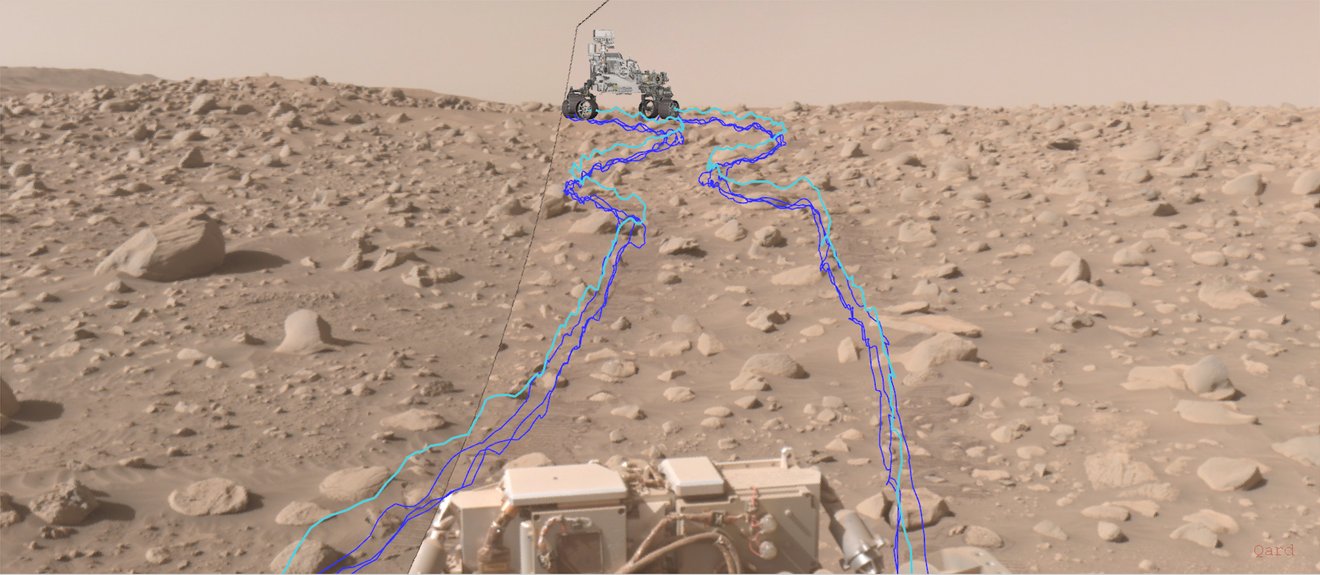
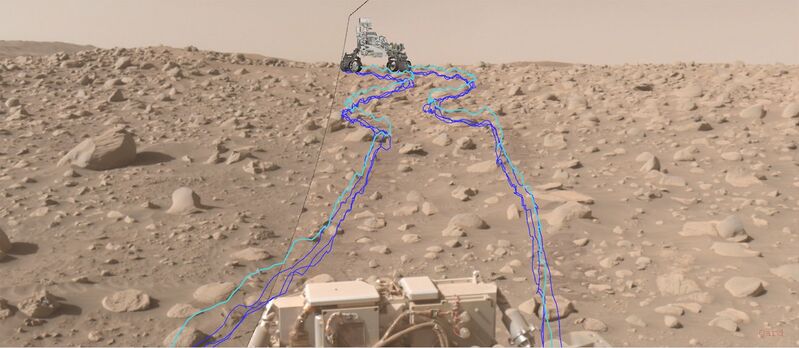
Revision as of 08:27, 23 September 2023 by Suitupshowup (talk | contribs) (This composite image, acquired June 29, 2023 and annotated at JPL using visualization software, shows Perseverance’s path through a dense section of boulders. The pale blue line indicates the course of the center of the front wheel hubs, while darker blue lines show the paths of the rover’s six wheels. Source: https://www.jpl.nasa.gov/news/autonomous-systems-help-nasas-perseverance-do-more-science-on-mars?utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=daily20230921-1...)
Size of this preview: 799 × 348 pixels. Other resolutions: 320 × 139 pixels | 1,320 × 575 pixels.
Original file (1,320 × 575 pixels, file size: 128 KB, MIME type: image/jpeg)
Summary
This composite image, acquired June 29, 2023 and annotated at JPL using visualization software, shows Perseverance’s path through a dense section of boulders. The pale blue line indicates the course of the center of the front wheel hubs, while darker blue lines show the paths of the rover’s six wheels.
Credit: NASA/JPL-Caltech
Licensing
Public domain images are available for anybody to use without any licenses, royalties, or special permissions.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 08:27, 23 September 2023 | | 1,320 × 575 (128 KB) | Suitupshowup (talk | contribs) | This composite image, acquired June 29, 2023 and annotated at JPL using visualization software, shows Perseverance’s path through a dense section of boulders. The pale blue line indicates the course of the center of the front wheel hubs, while darker blue lines show the paths of the rover’s six wheels. Source: https://www.jpl.nasa.gov/news/autonomous-systems-help-nasas-perseverance-do-more-science-on-mars?utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=daily20230921-1... |
You cannot overwrite this file.
File usage
The following page uses this file:






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}